Comparative study of EIGRP and
OSPF protocols based on
network convergence
Okonkwo, IJ and Emmanuel, ID
10.14569/IJACSA.2020.0110605
Title
Comparative study of EIGRP and OSPF protocols based on
network convergence
Authors
Okonkwo, IJ and Em manuel, ID
Type
Article
URL
This version is available at:
http://usir.salford.ac.uk/id/eprint/57895/
Publish e d Date
2020
USIR is a digital collection of the research output of the University of Salford.
Where copyright per mits, full text m aterial held in the repository is m ade
freely available online and can be read, downloaded and copied for non-
com mercial private study or research purposes. Please check the m a nuscript
for any further copyright restrictions.
For more information, including our policy and submission procedur e, please
contact the Repository Team at: usir@salford.ac.uk.

(IJACSA) International Journal of Advanced Computer Science and Applications,
Vol. 11, No. 6, 2020
Comparative Study of EIGRP and OSPF Protocols
based on Network Convergence
Ifeanyi Joseph Okonkwo
1
Imperial College London
London, United Kingdom
Ikiomoye Douglas Emmanuel
2
University of Salford
Manchester, United Kingdom
Abstract—Dynamic routing protocols are one of the fastest
growing routing protocols in networking technologies because of
their characteristics such as high throughput, flexibility, low
overhead, scalability, easy configuration, bandwidth, and CPU
utilization. Albeit convergence time is a critical problem in any of
these routing protocols. Convergence time describes summary of
the updated, complete, and accurate information of the network.
Several studies have investigated EIGRP and OSPF on the
internet; however, only a few of these studies have considered
link failure and addition of new links using different network
scenarios. This research contributes to this area. This
comparative study uses a network simulator GNS3 to simulate
different network topologies. The results are validated using
Cisco hardware equipment in the laboratory. The network
topology implemented in this research are star and mesh
topology. The results are validated using Cisco hardware
equipment in the laboratory. Wireshark is effectively used in
capturing and analyzing the packets in the networks. This helps
in monitoring accurate time response for the various packets.
The results obtained from Wireshark suggest the EIGRP has a
higher performance in terms of convergence duration with a link
failure or new link added to the network than the OSPF routing
protocol. Following this study EIGRP is recommended for most
heterogeneous network implementations over OSPF routing
protocol.
Keywords—OSPF (Open Shortest Path First); EIGRP
(Enhanced Interior Gateway Routing Protocol); routing; protocol;
network; convergence; topology; routers; packets; Wireshark
I. INTRODUCTION
Computer networking is now a fundamental part of life,
especially the use of the internet. As new technologies
emerge, the demand for wireless mobile computing is growing
fast, thus the need for efficient routing protocols [1]. These
protocols define the mechanism by which routers acquire
information about the performance of the network topology,
verify and identify the optimal route that a packet will take to
arrive at its destination. Hence, routing algorithms are crucial
because they select the best path for communication in a
heterogeneous network. Routing is the entire process of
selecting the optimal route for the transmission of data packets
from source to destination [2]. The process includes routers
advertising their known IP networks, the administrative cost to
its neighbor or adjacent routers, in this way the neighbor’s
routers gain knowledge of the characteristics and the topology
of the network, then update the routing table. The
administrative cost is the number of hops, link speed and
latency [3].
There has been different research about routing protocols,
especially on EIGRP and OSPF routing protocol in terms of
convergence time. This research in routing protocols has been
predominant because of the increasing demand of data
transmission over a reliable network connection amongst
enterprise companies, therefore network resilience/redundancy
has been the key in curbing link failures. If there is a link
failure in the network, the routing protocols are expected to
identify the failure and converge to form a new topology for
the continuous flow of packets in the network. Despite the
wide research and interest made, many problems about routing
protocols are yet to be solved in terms of convergence rate,
which can yield optimal routing to deliver high throughput in
heterogeneous networks. Hence, this work focuses on
analyzing several scenarios of link failures, measuring their
convergence rate, and identifying changes in the network
topology when using EIGRP and OSPF routing protocol [4].
The rate of convergence occurs when all the routers in the
network have an updated, complete, and accurate information
on the network. The convergence rate includes the total time
required by all the routers to calculate the optimal path, update
their routing tables, and share the routing information with
neighboring routers in the network.
The remainder of this study is planned as follows. In
Section II, present a brief literature of recent work and
background knowledge of Routing Information Protocol
(RIP), OSPF and EIGRP. Section III describes the
methodology, where the network topology such as star and
mesh are designed. Section IV presents the design parameters
and metrics, which includes the Hello interval, hop count and
interface cost. Section V are the Wireshark results and
Section VI is the presentation and analyses of the results.
Finally, the work is concluded in Section VII.
II. B
ACKGROUND
Dynamic routing protocols allow changes in the network
topology because of the update in routing tables. Dynamic
routing protocol is divided into distance vector routing
protocols and link state routing protocols. Distance vector
routing protocols calculate the administrative cost of a packet
arriving at a destination based on the number of routers the
packet passes through, these include Routing Information
Protocol (RIP) and EIGRP) [5]. Whilst, Link state routing
protocol is building a complete topology of the network and
calculates the optimal path from the topology for all
interconnected networks, these include Intermediate System to
39 | Page
www.ijacsa.thesai.org

(IJACSA) International Journal of Advanced Computer Science and Applications,
Vol. 11, No. 6, 2020
Intermediate System (IS-IS) and Open Shortest Path First
(OSPF) [3].
There are series of research in convergence time, packet
loss and throughput of OSPF, EIGRP and RIP routing
protocol. Each of this research work has a unique role they
play in network efficiency. The first research work was the
Advanced Research Projects Agency Network (ARPANET) in
1969, which is the foundation of most routing algorithms [6].
Furthermore, [7] designed a star network topology consisting
of a switch, eight cisco routers and 14 hosts using the cisco
packet tracer to determine the convergence time. In a similar
context [8] determines a comparative study of RIP, OSPF and
EIGRP using ring topologies on GNS3 network simulator.
The design comprises five routers connected in a ring
topology with a personal computer that makes use of
networking management tools to manage the information in
the network. Also, [9] evaluates dynamic routing protocols for
real time applications such as voice, video based on
convergence time, end to end delay by using Cisco Packet
Tracer
1
and OPNET simulator. The design is implemented
using ten routers with two switches and ten personal
computers using a mesh topology. Author in [10] analyze
EIGRP and OSPF protocol with OPNET for real time
application with a focus on large, realistic and scalable
networks. Lastly [11], did a comparison of OSPF and EIGRP
in a small IPv6 Enterprise Network. Hence, within the best of
our knowledge of the literature presented. There is yet to be a
deep analysis of OSPF and EIGRP considering the scalability,
resilience, and validation of simulator results with Cisco
active devices.
A. Routing Information Protocol (RIP)
RIP is the first routing protocol implemented in the
TCP/IP and uses the variants of the Bellman-Ford algorithm
that was designed by Richard Bellman and Lester Ford in
1958
2
. They perform three functions, discovering the neighbor
router addresses, downloading of the routes, and updating the
routing table and the cost associated with each route. The first
RIP was designed in 1969; it has three versions RIPv1, RIPv2,
and RIPng. The latest version of RIPv2 and RIPng works in
IPV6 autonomous based systems. The implementation of the
exchange of information through the User Datagram Protocol
(UDP) and each router is limited to several routers in the
network around it. The RIP applies a hop count mechanism to
determine the optimal path for packet routing and a maximum
of 16 hops is applied to avoid routing loops in the network
2
.
B. Open Shortest Path First (OSPF)
OSPF is one of the widely used link state routing
protocols. It operates by routing network packets by gathering
link state information from neighboring routers thus,
computing a map of the network. OSPF sends different
messages, which include the hello messages, link state
request, updates, and database description packets
3
. OSPF
operates with Dijkstra's algorithm, which focuses on the
distribution of routing information in a single autonomous
system. There are different versions of OSPF; the first version
1
Cisco Packet Tracer: https://www.netacad.com/courses/packet-tracer
2
RFC 2453, RIP Version 2 https://tools.ietf.org/html/rfc2453
3
RFC 2328, OSPF Version 2 https://tools.ietf.org/html/rfc2328
was designed in 1989, which is known as OSPFv1 published
in RFC 1131, in 1998 the second version OSPFv2 published
in RFC 2328 and in 1999, the OSPFv3 is designed specifically
to accommodate the IPv6 published in RFC 5340
4
. OSPF
calculations are computed periodically on the link state
advertisement (LSA) received in the network and protocol
information [12]. A change in the topology is detected
quickly; hence, it is fast, flexible, and scalable in terms of
configuration parameters. The metric represents the path cost
between interfaces in OSPF and that define the speed,
bandwidth from nodes to another in the network [3].
C. Enhanced Gateway Routing Protocol (EIGRP)
The Enhanced Gateway Routing Protocol is a hybrid
routing protocol developed in 1994. EIGRP focuses on
Classless Inter-Domain Routing/Variable length Subnet Mask,
route summarization with discontinuous networks and
supports load balancing across six routes to a single
destination. The EIGRP is designed based on the DUAL
(Diffusing Update Algorithm) algorithm and uses multicast
for routing updates [13]. The DUAL algorithm is used in
obtaining route freedom every time throughout different
routing computation and uses the reliable transport protocol to
ensure the successful delivery of each packet [13].
III. M
ETHODOLOGY
In the design of network scenarios, there are two network
topologies implemented. These topologies are used in
determining the convergence time of EIGRP and OSPF
routing protocol. In the analyses, design of four, six, eight till
twenty routers are implemented for both Star and Mesh
topologies for EIGRP and OSPF routing protocol using a
network simulator and Cisco hardware equipment.
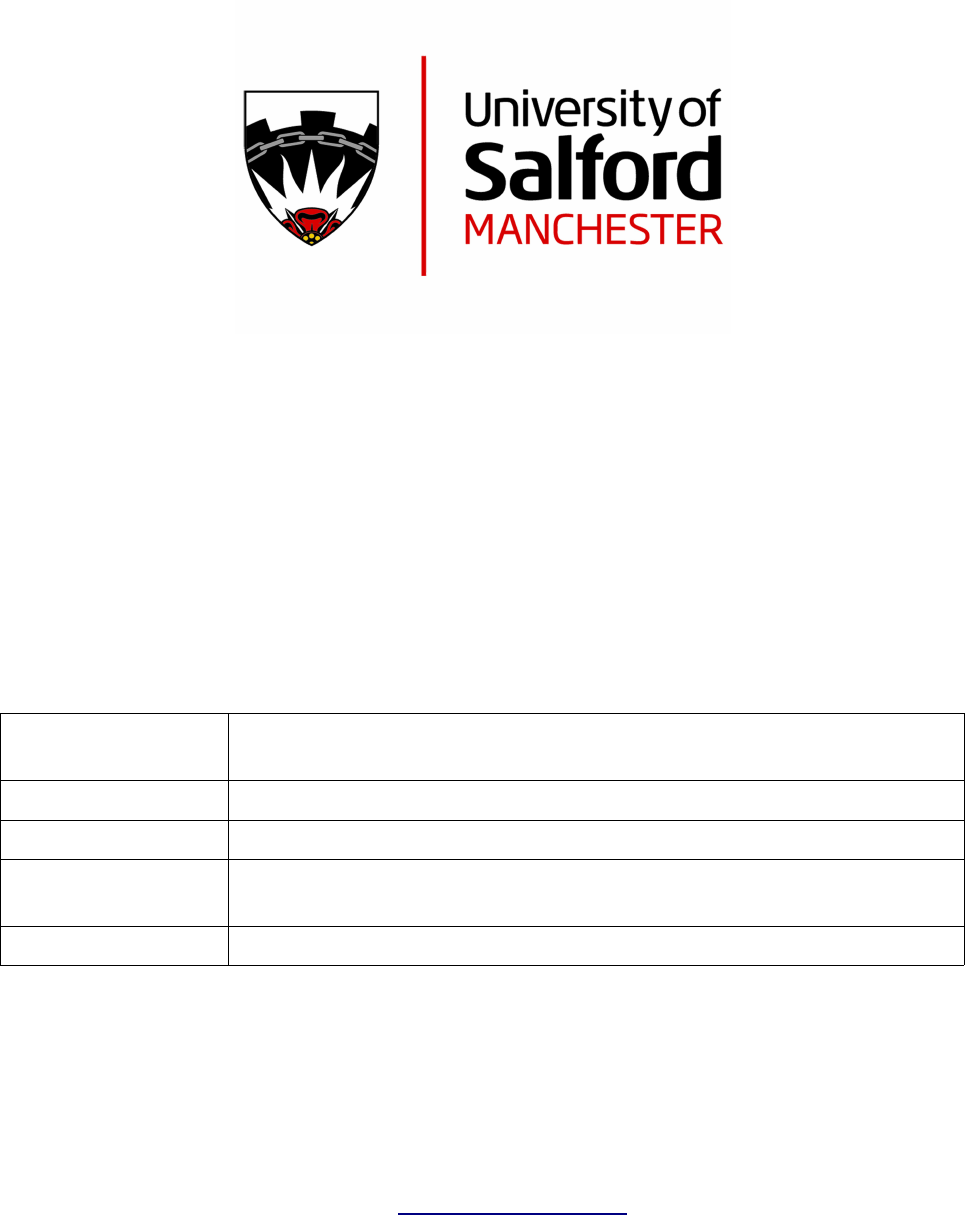
A. Star Topology
In this topology, all the devices are connected to a central
hub or switch in a point-to-point connection. The advantage of
this topology, it is easy to troubleshoot and isolate problems. It
is easily expanded without disruption of the network topology.
In this design, the use of loop backs is implemented because a
star topology is based on a single network, but since routing
applied to a heterogeneous network, it allows hop-to-hop
transmission of data. Hence, loop back helps in creating a
virtual subnet in the network and each virtual subnet has a
network ID as a result making the network to be
heterogeneous [14]. Fig. 1 shows a simple design of six
routers with the loopback network as virtual subnets.
B. Mesh Topology
Mesh topology is a topology where all devices are
connected to each other. Hence, they have a high level of
redundancy. They are rarely implemented in today’s networks
because of the cabling cost, wiring which is complicated and
the problem faced in troubleshooting the network at failure.
There are two variations of mesh topology, full and partial
mesh topology, in this design a partial mesh topology is
implemented because of the number of ports in the routers
[15]. Fig. 2 shows a diagram showing partial mesh topology
designed to be used in the network.
4
RFC 5340, OSPF for IPv6 https://tools.ietf.org/html/rfc5340
40 | Page
www.ijacsa.thesai.org
(IJACSA) International Journal of Advanced Computer Science and Applications,
Vol. 11, No. 6, 2020
Fig. 1. Design of Star Topology for Open Shortest Path First Routing
Protocol using Loop Back.
Fig. 2. Design of Mesh Topology for Enhanced Interior Gateway Routing
Protocol.
IV. DESIGN PARAMETERS AND METRICS
In the design of the EIGRP and OSPF Routing Protocols,
there are parameters that are considered in the design such as
the interface cost, hello interval, and maximum hops. These
parameters are key in the implementation of the EIGRP and
OSPF Routing Protocols in both the network simulator and
hardware implementation.
A. Open Shortest Path First Routing Protocol
In the OSPF routing protocol, the cost associated with the
interfaces depends on the network cables used in the design.
In each of the topology designs, the interface cost is equal to
one (1) because Fast Ethernet is implemented and for the hello
interval ten seconds is used. The router dead interval and
transmission delay are set to be 40 and one seconds
respectively [16]. OSPF routing protocol does not have a
maximum number of hops. See Table I for setup.
B. Enhanced Interior Gateway Routing Protocol (EIGRP)
In EIGRP, the cost associated with the interfaces is one (1)
for both software and hardware implementation. Since Fast
Ethernet link is used so the cost is equal to one (1) while in the
hello interval is ten seconds and the hold time is three times
the hello interval. The split horizon is enabled to avoid
advertisement of route to the neighbor from which route was
learned [17]. See Table II for setup.
C. Convergence Duration
The convergence duration occurs when all the routing
tables in all the routers in each network are consistent. In
OSPF, convergence duration involves the total time taken for
all the routers to exchange the database description packets
among the routing tables on the network. These include
determining the best path and sharing the complete
information in all the routers in the network. In EIGRP, the
convergence time is the total time taken for the updates
packets and acknowledgment packets to distribute the routing
information among the different routers in the network.
Furthermore, the complete time required for each router in the
network to have complete information on the neighboring
routers defines the convergence time. In addition, it comprises
the speed of transmission and calculation of the optimal paths
taken [18].
D. Convergence Startup Time
This is a measure of how fast and precise individual
routers in a group or network are connected dynamically to
exchange their routing among themselves for the first time in
the network. This is very important because the faster the
network converges the faster it can start its routing process.
E. Convergence Failure
This is a measure of how fast and precise time taken for
individual routers in a network to converge dynamically or
adapt to changes in the network such as node failure, loop
back or any other factor that causes a network to fail.
F. Convergence New Link
This is to measure how fast and precise time taken for
individual routers in a network to converge dynamically or
recover from changes in the network as a result of adding a
new link or nodes. Hence, in the addition of a new link or
node, the convergence time will be changed [19], owing to
determination of the new convergence time.
TABLE I. DESIGN PARAMETERS VALUE FOR OSPF ROUTING PROTOCOL
Parameters Implemented
Interface Cost 1.00
Hello Interval 10.00 seconds
Router Dead Interval 40.00 seconds
Transmission Delay 2.00 seconds
Retransmission Interval 5.00 seconds
Number of Hops Unlimited
TABLE II. DESIGN PARAMETERS VALUE FOR ENHANCED INTERIOR
GATEWAY ROUTING PROTOCOL
Parameters Implemented
Interface Cost 1.00
Hello Interval 10.00 seconds
Hold Time 30.00 seconds
Split Horizon Enabled
Number of Hops (limited) 100
41 | Page
www.ijacsa.thesai.org
(IJACSA) International Journal of Advanced Computer Science and Applications,
Vol. 11, No. 6, 2020
G. Graphical Network Simulator (GNS3)
GNS3
5
(1.5.4) is an open source software with no
limitation of the number of devices that will be used in the
environment. It mimics a real-time network scenario
simulation for pre-deployment without the need for hardware.
Omnet++, NS2, and OPNET are also powerful open source
software that can be used in designing network models. They
are built on the platform of a discrete event simulator. Which
is used in networking research and provides a comprehensive
development environment to support user-defined models
[18]. However, GNS3 comes with an inbuilt Wireshark for
packet capturing and monitoring.
H. Wireshark
Wireshark
6
is a powerful computer software used for
network packet analyzer. The network packet analyzer verifies
and captures network packets and displays comprehensive
information of the packet data. Some useful features include
capturing live packet data, displaying packets with detailed
information, filter packets, search, and create various statistics
about the packet data. In this work, Wireshark comes inbuilt
with GNS3, making the capture of the packet data to be more
realistic and effective than using extra hardware to capture the
information of the packets [20]. Wireshark is proposed ahead
of other monitoring devices because it captures network
failures, recovery, and jitter performance of the two protocols.
Therefore, Wireshark is used in the hardware implementation
and importantly, Wireshark does not require any external
component for the capturing of packets [20].
I. Cisco Packet Tracer
The Cisco Packet
7
Tracer is an innovative network and
technology tool developed by Cisco Networking Academy. It
provides a combination of realistic simulation and
visualization experiences for different user’s collaborations. In
this work, it is used in designing the network topology that
will be used for analysis or reference models.
V. W
IRESHARK RESULT
The Wireshark results helps in checking the network
configuration, a design implemented using the EIGRP and
OSPF routing protocol. The results monitored or obtained are
expected to mimic most of the characteristics highlighted in
the background knowledge of OSPF and EIGRP.
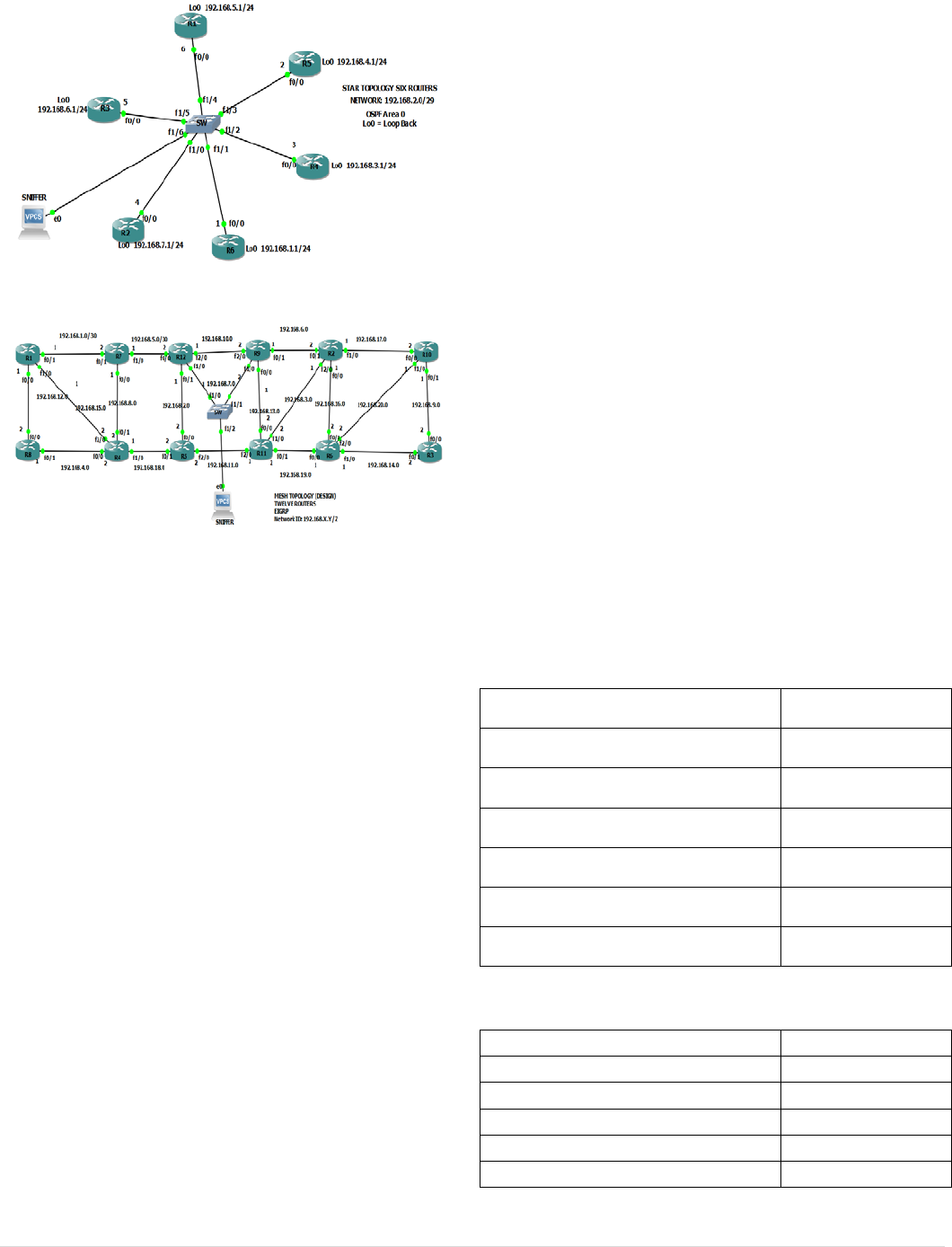
A. Open Shortest Path First Routing Protocol Result
The convergence startup time is the duration of the first
Database description till the last link-state acknowledgement
packets are displayed in Fig. 3.
The database description provides information of each
router in the network. Wireshark monitors the entire exchange
of the packets in the different topology designed in the
network. The results show the Hello, Database Description
packets when implementing OSPF (Simulator). The link-state
request, updates, and acknowledgment operate synonymously.
The link-state request sends a specific request to nodes in the
5
https://gns3.com/
6
https://www.wireshark.org/
7
https://www.netacad.com/courses/packet-tracer
network when the request is sent. The network updates itself
to identify the changes in topology and reply with an
acknowledgment.
B. Enhanced Interior Gateway Routing Protocol Result
The Enhanced Interior Gateway Routing Protocol packets
are different from the ones obtained in Open Shortest Path
First Routing Protocol. The convergence duration occurs when
the hello packets have been distributed in the entire nodes in
the network followed by the updates and acknowledgement
packets. The monitoring software (Wireshark) captures all the
Hello, updates and acknowledgment packets in the network
that leads to convergence between the routers. Enhanced
Interior Gateway Routing Protocol operates such that
whenever there are changes in the link or nodes in the
network, it will send out a query packet that will have an
equivalent reply. This occurs because of a shutdown or failure
in any of the links or nodes (routers) in the network. The result
is shown in Fig. 4.
Fig. 3. Wireshark Results of updates and Acknowledgement Packets for
OSPF.
Fig. 4. Wireshark Results of updates and Acknowledgement Packets for
EIGRP.
42 | Page
www.ijacsa.thesai.org
(IJACSA) International Journal of Advanced Computer Science and Applications,
Vol. 11, No. 6, 2020
VI. RESULT AND DISCUSSION
In the design of the EIGRP and OSPF Routing Protocols,
two topologies are examined (Star and Partial Mesh) which
are widely used in today’s networking for both software and
hardware implementation.
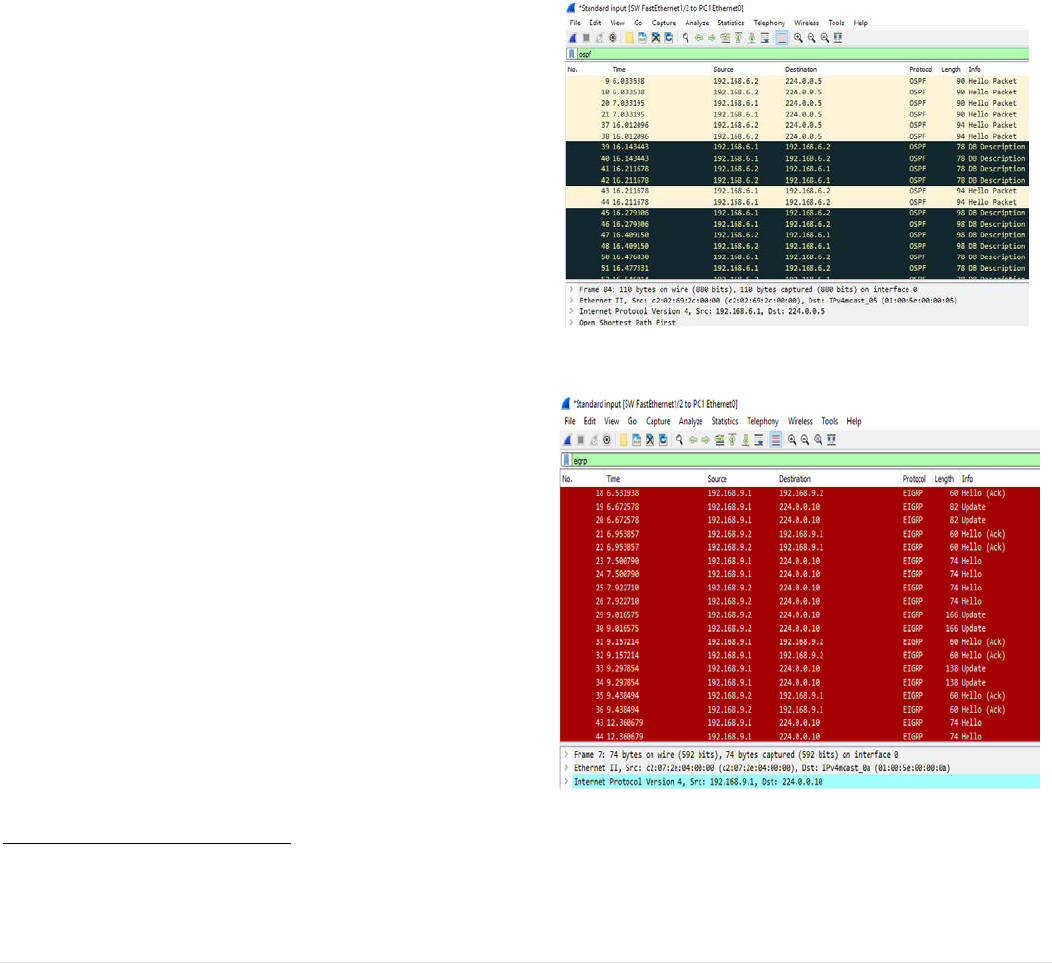
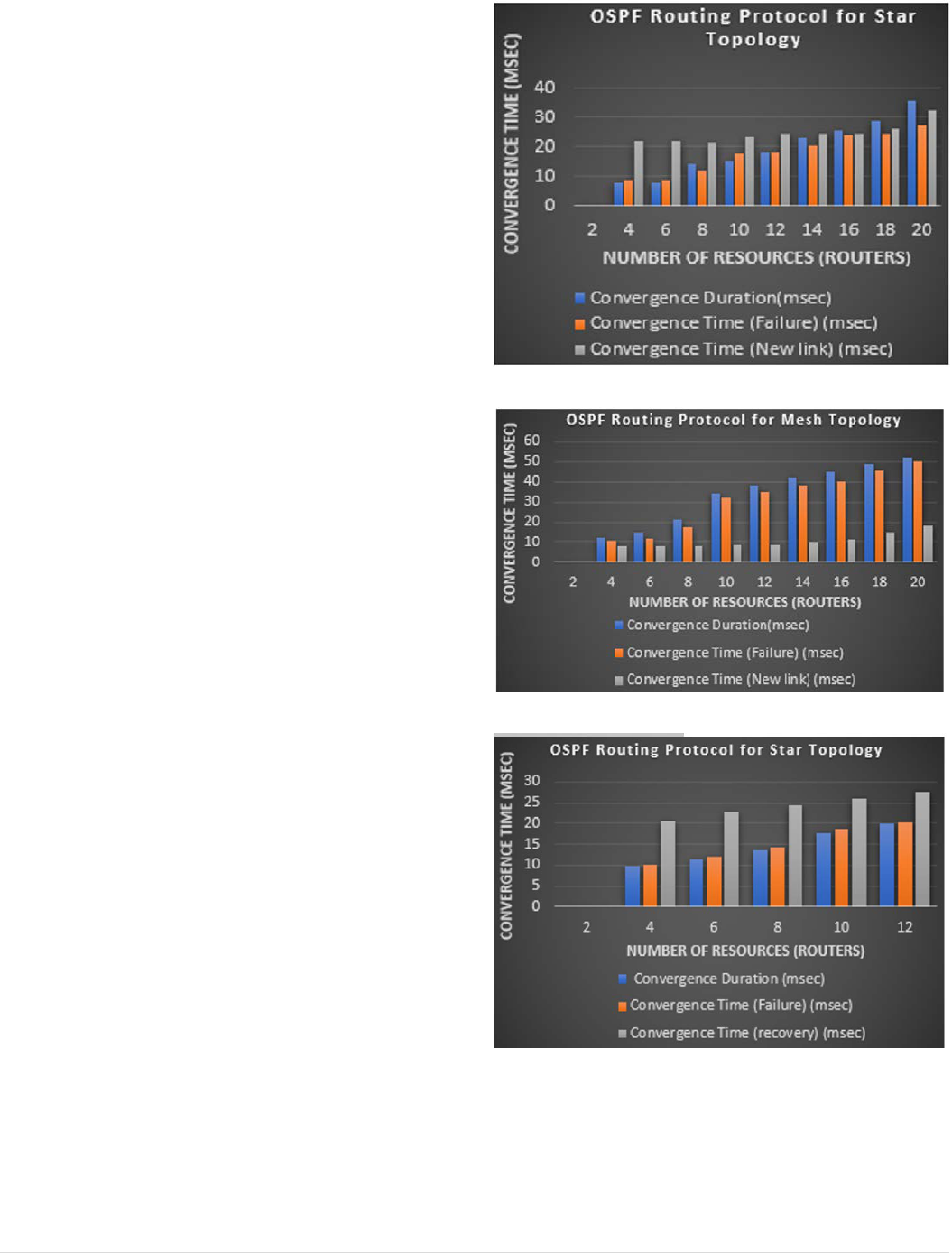
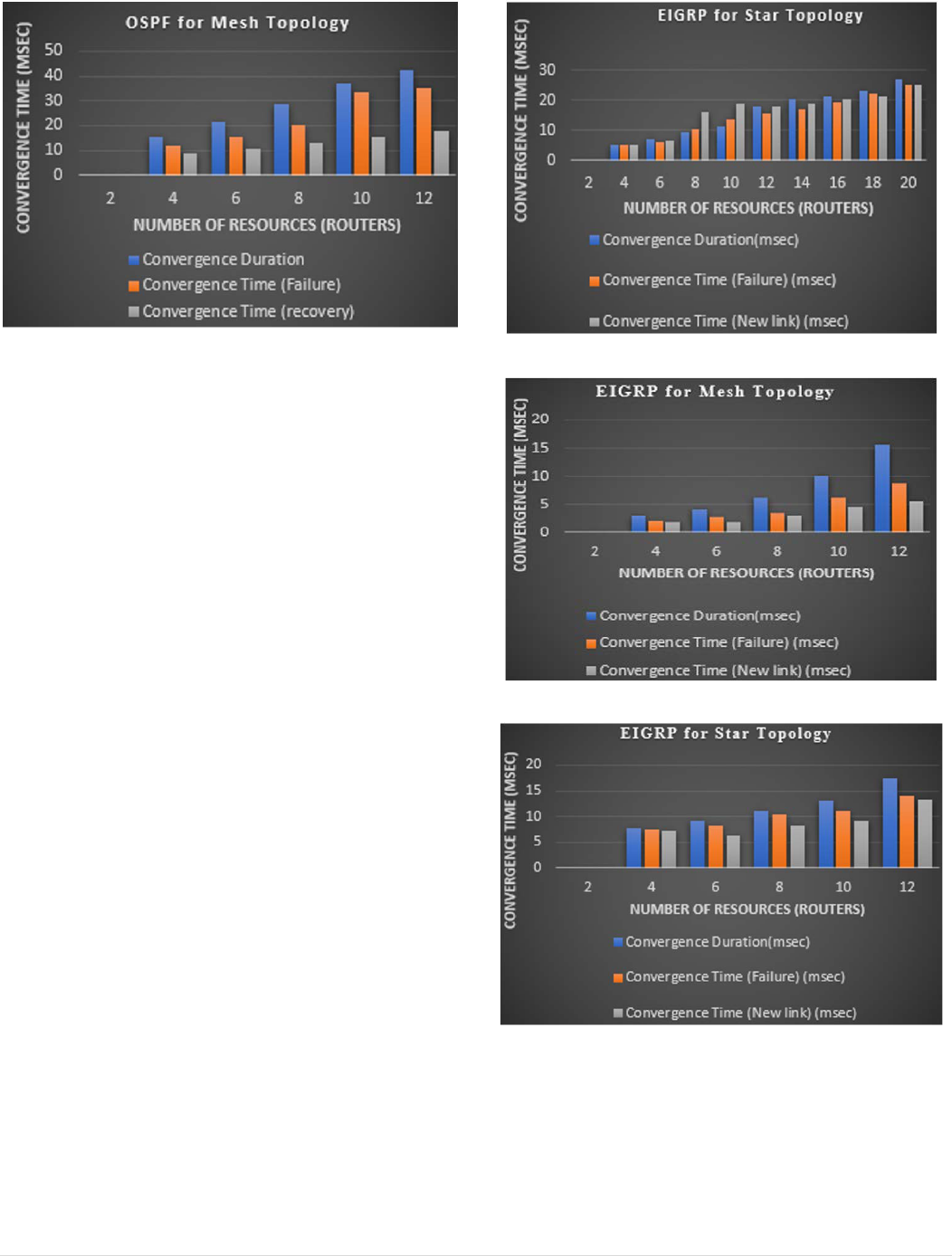
A. OSPF Routing Protocol (Star Topology) Software
The average convergence duration at the start of the
network and when one of the links fail of star topology using
OSPF increases as the number of resources increases. The
results shows that when the number of routers is less than ten
(10), it takes less than 15.5 milliseconds for the routers to
converge, the same occurs when one of the links fails in any
of the designs. Meanwhile, when a new link is installed in the
network, it requires a longer time to converge, though this
does not transpire in all cases, see Fig. 5.
B. OSPF Routing Protocol (Mesh Topology) Software
The results show that when a new link is added to the
network, it requires less time for the network to converge.
More than 90% of the time, it requires less than 20
milliseconds for the network to converge when new nodes are
added. The time required for the network to converge at a start
and when a link fails are relatively the same. Moreover, it
takes less than 9% of the time for the difference between the
convergence time at the start and when a link fails in each of
the numbers of resources. Furthermore, the result obtained
shows that mesh topology takes a longer time to converge at
the start and when there is a link failure especially as the
number of routers increases in the network, see Fig. 6.
C. OSPF Routing Protocol (Star Topology) Hardware
The result is the same as the simulated result obtained in
(A) above, just a slight difference which is negligible. When
the number of routers is twelve (12) the convergence time is
19.85 milliseconds which is slightly higher than the simulator
results with 1.2 milliseconds. Whereas when a link fails, the
time required for it to re-converge is 20.23 milliseconds which
is approximately 20.0 milliseconds. When a new node is
added to the network the time difference between the
simulated and hardware result is 3 milliseconds. The GNS3
result is slightly different from the hardware result with about
10% which might be from errors of configuration or computer
bugs that is associated with GNS3, see Fig. 7.
D. OSPF Routing Protocol (Mesh Topology) Hardware
The time taken for the convergence duration is high when
compared with the simulator results obtained. When a new
link is added to the network, it takes 17.85 milliseconds for
the network to converge while in the simulator is 8.98
milliseconds. Furthermore, the results obtained in the
hardware simulation have a stable slope and consistent trend
than the results obtained using GNS3. In each of the network
scenarios or number of resources the convergence duration,
the time when a link fails, and new links are added to the
network is higher in the hardware implementation than the
simulator results obtained, see Fig. 8.
Fig. 5. OSPF Results for Star Topology – Software.
Fig. 6. OSPF Results for Mesh Topology – Software.
Fig. 7. OSPF Results for Star Topology (Hardware).
43 | Page
www.ijacsa.thesai.org
(IJACSA) International Journal of Advanced Computer Science and Applications,
Vol. 11, No. 6, 2020
Fig. 8. OSPF Results for Mesh Topology (Hardware).
E. EIGRP (Star Topology) Software
The result obtained is consistent all through the different
convergence time. It takes an average of 5.25 milliseconds for
the network to converge, the same time it requires when a link
fails, or a new link is added to the network. Furthermore, it
takes an average of 26.25 milliseconds for the network to
converge when a link fails or when a new link is added to the
network when the number of resources is twenty 20
(maximum). The results indicate that the higher the resources
the slower the network takes to converge in each network
scenario. The average convergence time in EIGRP is faster
compared to the OSPF routing protocol when using the same
number of resources, settings, and devices, see Fig. 9.
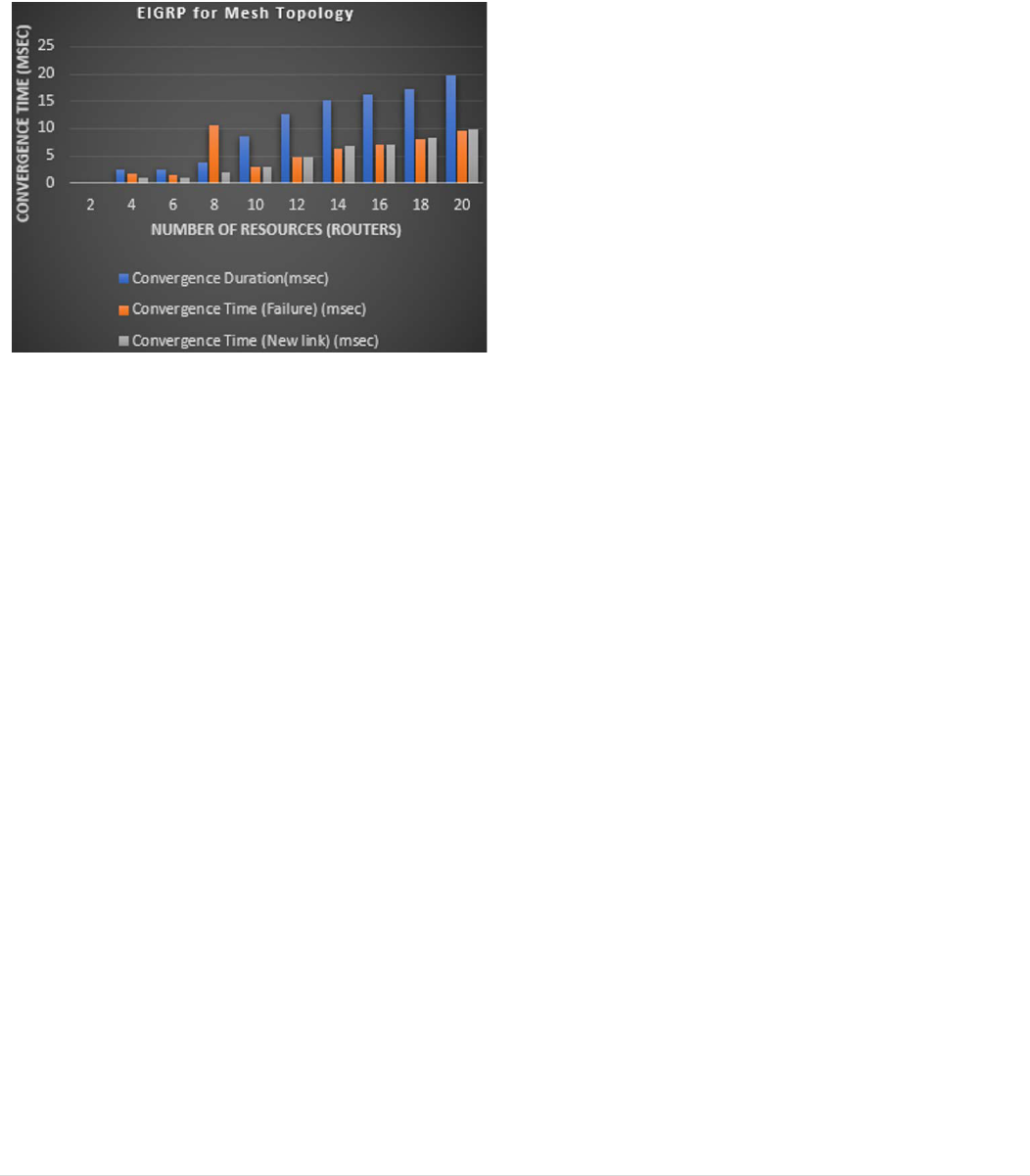
F. EIGRP (Mesh Topology) Software
The results described the mesh topology to have the best
convergence duration, time when a link failure and new links
are added to the network. It takes an average of
1.8milliseconds for the network to converge when the number
of resources is 4. The same time (1.8milliseconds) is required
when a link fails, or a new link is added to the network. The
results describe that as the number of resources increases, the
convergence time increases representing a straight-line graph,
see Fig. 10. Furthermore, the results described that EIGRP has
a higher convergence period or performance in all the network
scenarios than any of the topologies implemented in simulated
and hardware devices.
G. EIGRP (Star Topology) Hardware
Considerably, it takes a longer time for the network to
converge compared to when a link is shut, or a new link is
added to the network. It requires an average of
17.54milliseconds for the network to converge at the
beginning while it requires less than 14.00milliseconds to
converge when a link failure or a new link is added to the
network, see Fig. 11. This might be because of the
implementation of virtual subnets (loop back) in the star
topology. On the average, the results obtained from the
hardware implementation are better than the simulator with
about 10% in terms of convergence duration, the time when a
link fails, and a new link is added to the network.
Fig. 9. EIGRP Result for Star Topology (Software).
Fig. 10. EIGRP Result for Mesh Topology (Software).
Fig. 11. EIGRP Result for Star Topology (Hardware).
H. EIGRP (Mesh Topology) Hardware
The mesh topology using the EIGRP provides the best
performance for convergence duration, the time when a link
fails, and new links are added to the network. The hardware
results obtained are not different from the simulator results.
The slight difference occurs in the convergence duration with
44 | Page
www.ijacsa.thesai.org
(IJACSA) International Journal of Advanced Computer Science and Applications,
Vol. 11, No. 6, 2020
about 3.0 milliseconds when the network is flooded with
twelve routers. Because the convergence time of the failure of
a link and when a new link is added does not change. The
results indicate that EIGRP performs better in convergence
time since both software and hardware implementation
provides less than 10.0milliseconds for the network to
converge when a link fails, and a new link added to the
network, see Fig. 12.
Fig. 12. EIGRP Result for Mesh Topology (Hardware).
VII. CONCLUSION
A reflective summary of these experiments enables the
justification and analyses of EIGRP and OSPF routing
protocol using GNS3 and Cisco IOS devices using different
network scenarios. The EIGRP uses DUAL which helps in
recalculating a given route globally to avoid routing loop, so it
has the attributes of a link state and distance vector routing
protocol. This ensures a faster convergence time in all the
topologies when using GNS3 and Cisco IOS devices. This
experiment contributes to the existing knowledge by
identifying that: mesh topology has the best topology for
convergence time ahead of star topology. Based on the result
obtained, it clearly states that hardware implementations of
routing protocol are better than using a network simulator.
Because the network simulator has computer bugs, runtime
failure, updates and simulation errors which influence the
results obtained when implementing EIGRP and OSPF routing
protocol. The conclusion described in the network scenarios
indicates that EIGRP has a higher performance in convergence
duration, the time when a link fails, and new links added to the
network than OSPF routing protocol. This is because EIGRP
does not perform routing updates that require longer time
compared to the OSPF routing protocol.
Also, this research cannot be limited to only OSPF and
EIGRP, further analysis to BGP comparison with the above
protocol to see their different performance will be a good
research. Also, with the transition from IPV4 to IPV6,
research on how the protocol changes or adaptation in terms of
convergence time with the versions of IPV4 and IPV6 can be
examined. Finally, the Latency and Quality of Service are
vital areas of research in both EIGRP and OSPF routing
protocol.
REFERENCES
[1] Nefkens P-J. Phase Three: Design, Deploy, and Extend. In:
Transforming Campus Networks to Intent-Based Networking. Cisco
Press; 2019.
[2] Lamle T. CCNA® Cisco Certified Network Associate. Sybex; 2011.
[3] Hill S. Distance Vector Routing Protocols. Greater Manchester; 2016.
[4] Lacoste R, Edgeworth B. Chapter 2: EIGRP. In: CCNP Enterprise
Advanced Routing ENARSI 300-410 Official Cert Guide. Cisco Press;
2020.
[5] Tanenbaum AS, Wetherall DJ. Computer Networks. 2010.
[6] Evans J, Schneider G, Pinard K. The Internet Illustrated. 6th edition.
London: Course Technology Inc; 2009.
[7] Dey GK, Ahmed MM, Ahmmed KT. Performance analysis and
redistribution among RIPv2, EIGRP & OSPF Routing Protocol. In: 1st
International Conference on Computer and Information Engineering,
ICCIE 2015. Institute of Electrical and Electronics Engineers Inc.; 2016.
p. 21–4.
[8] Larrea Luzuriaga R, Jimenez J, Sendra S, Lloret J. Comparative Study
of Routing Protocols in Ring Topologies using GNS3. Valencia; 2016.
38–44 p.
[9] Sirika S. Performance Evaluation of Dynamic Routing Protocols for
Real time application. Int J Eng Trends Technol. 2016 Feb;Volume
32:328–37.
[10] Anibrika BS, Adamu M, Franklin A, Asante M. Performance Analysis
of Enhanced Interior Gateway Routing Protocol (EIGRP) Over Open
Shortest Path First (OSPF) Protocol with Opnet. Int J Adv Comput Sci
Appl. 2016 May;7.
[11] Whitfield R, Zhu SY. A comparison of OSPFv3 and EIGRPv6 in a small
IPv6 enterprise network. Int J Adv Comput Sci Appl [Internet].
2015;6(1):162–7. Available from: http://hdl.handle.net/10545/620915.
[12] Hellberg C, Greene D, Boyes T. Designing a Triple-Play Backbone. In:
Broadband Network Architectures: Designing and Deploying Triple-
Play Services. 2007.
[13] Diaz L. Diffusing Update Algorithm or DUAL. In: CCNA Routing and
Switching 200-125 Certification Guide. Packt Publishing; 2018.
[14] Usman A. Cisco Packet Tracer Overview [Internet]. 2014 [cited 2020
Jun 21]. p. 9–14. Available from: https://www.slideshare.net/
AliUsman10/cisco-packet-tracer-overview.
[15] Henry T. Network Topologies. In Rhodes Island; 2017. Available from:
https://homepage.cs.uri.edu/~thenry/csc414/72_NetworkTopo_TOC.pdf.
[16] Mirzahossein Michael Nguyen Sarah Elmasry K. Analysis of RIP,
OSPF, and EIGRP Routing Protocols using OPNET [Internet]. 2013
[cited 2020 Jun 21]. Available from: www.sfu.ca/~mtn9/Group5.html.
[17] Wallace K. Split Horizon | CCNA Routing and Switching 200-125
[Internet]. Pearson IT Certification 2016; 2016 [cited 2020 Jun 21].
Available from: https://learning.oreilly.com/videos/ccna-routing-
and/9780134580715/9780134580715-CCNA_03_03_05.
[18] Kaur S, Roohie NM. (PDF) Performance Analysis of Interior Gateway
Protocols. Adv Res Electr Electron Eng [Internet]. 2014 [cited 2020 Jun
21];01(01):59–63. Available from: https://www.researchgate.net/
publication/303812574_Performance_Analysis_of_Interior_Gateway_Pr
otocols.
[19] Coleman A, Bombal D, Duponchelle J. Getting Started with GNS3 -
GNS3 [Internet]. 2020 [cited 2020 Jun 20]. Available from:
https://docs.gns3.com/1PvtRW5eAb8RJZ11maEYD9_aLY8kkdhgaMB
0wPCz8a38/index.html.
[20] Sharpe R, Warnicke E, Lamping U. Wireshark User’s Guide Preface
Foreword [Internet]. 2020 [cited 2020 Jun 20]. Available from:
https://www.wireshark.org/docs/.
45 | Page
www.ijacsa.thesai.org
